05 Autonomous drone programming with ROS
ROS, or Robotic Operating System, is an open source stack for robotics. It runs on multiple OSes, but we'll cover installing ROS-kinetic on Ubuntu* (OS installation described here).
After that, you're in familiar territory. You can run ROS commands as you're used to. Intel Aero is using 4 ROS nodes of interest:
- communicate with the flight controller using the MAVROS node. MAVROS is designed to work with MAVLINK compatible flight controllers, like Intel Aero Flight Controller with PX4 or Arudpilot stacks.
- interact with the Intel Real Sense R200 camera using RealSense node.
- as an alternative to the MAVROS node, you can access the IMU with a dedicated node imu_driver. MAVROS will give you access to the entire MAVLink protocol (IMU included), imu_driver will give you access to the IMU only in a simpler way.
- in addition to the Intel Real Sense node, you can use the (Intel Aero camera node)[https://github.com/intel/camera_driver].
A good intro on MAVROS with Gazebo simulator is kindly provided by University of California - Merced course UCM-ME190
sudo add-apt-repository http://packages.ros.org/ros/ubuntu
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net --recv-key 0xB01FA116
sudo apt-get update
sudo apt -y install ros-kinetic-desktop-full ros-kinetic-rqt python-rosinstall ros-kinetic-realsense-camera ros-kinetic-mavros ros-kinetic-web-video-server ros-kinetic-visp-tracker ros-kinetic-visp-camera-calibration ros-kinetic-vision-visp ros-kinetic-vision-opencv ros-kinetic-video-stream-opencv ros-kinetic-uvc-camera ros-kinetic-usb-cam ros-kinetic-test-mavros ros-kinetic-rviz-visual-tools ros-kinetic-rostopic ros-kinetic-roslaunch python-rosinstall python-rosinstall-generator python-wstool build-essential ros-kinetic-pyros python-rosdep
sudo rosdep init
rosdep update
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
sudo geographiclib-get-geoids egm96-5roscore &
roscd realsense_camera
roslaunch realsense_camera r200_nodelet_rgbd.launch &
rosrun mavros mavros_node _fcu_url:=tcp://127.0.0.1:5760 _system_id:=2 &I launched core, RealSense and mavros in 3 terminals to see the logs:
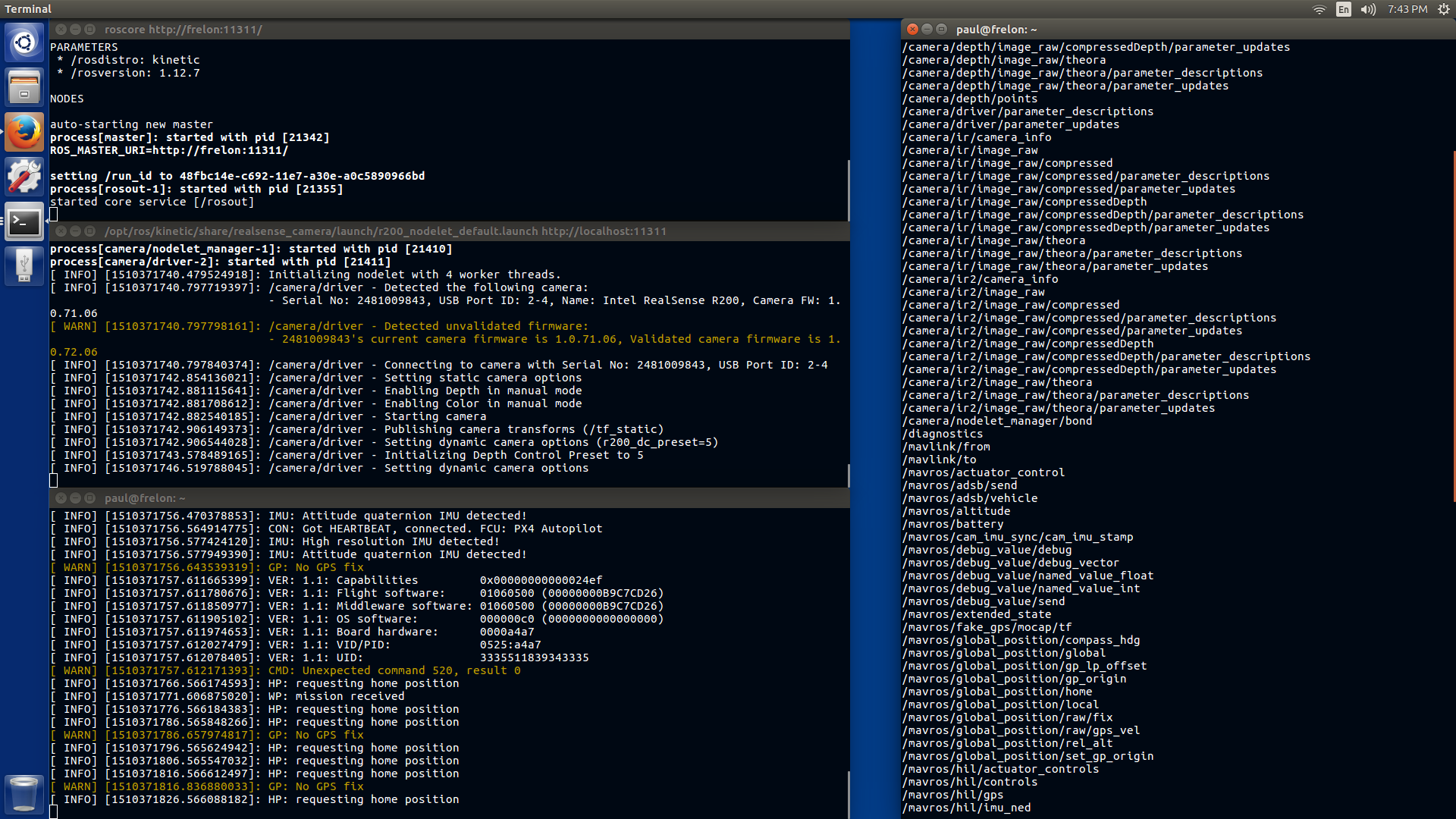
If you ask for the list of topics, with rostopic list, you'll get a long list including:
/camera/color/camera_info
/camera/color/image_raw/compressed
/camera/depth/image_raw/compressed
/camera/ir/image_raw/compressed
/camera/ir2/image_raw/compressed
/mavlink/from
/mavlink/to
/mavros/actuator_control
/mavros/adsb/send
/mavros/adsb/vehicle
/mavros/altitude
/mavros/battery
it means you have both RealSense and MAVlink topics available.
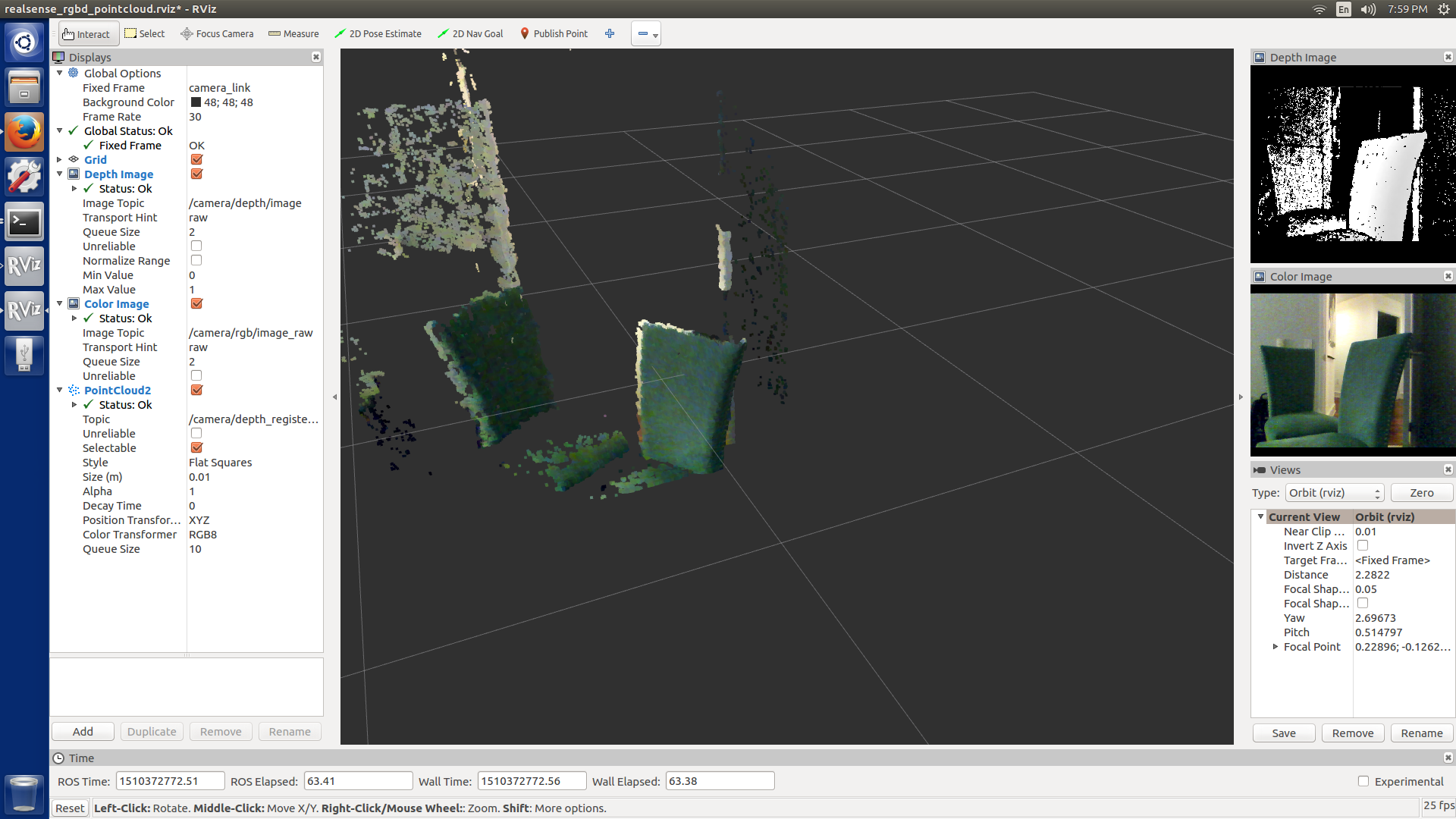
After you launched ROS, use rossun rviz to see the RealSense output:
roscd realsense_camera
rosrun rviz rviz -d rviz/realsense_rgbd_pointcloud.rviz
you can also try realsenseRvizConfiguration2.rviz and realsenseRvizConfiguration3.rviz.
A point cloud is the sum of 3D and depth data, both coming from the R200 camera. In this screenshot, you can see the 2 chairs from the camera point of vue, but also from the side to show you it's in 3D.
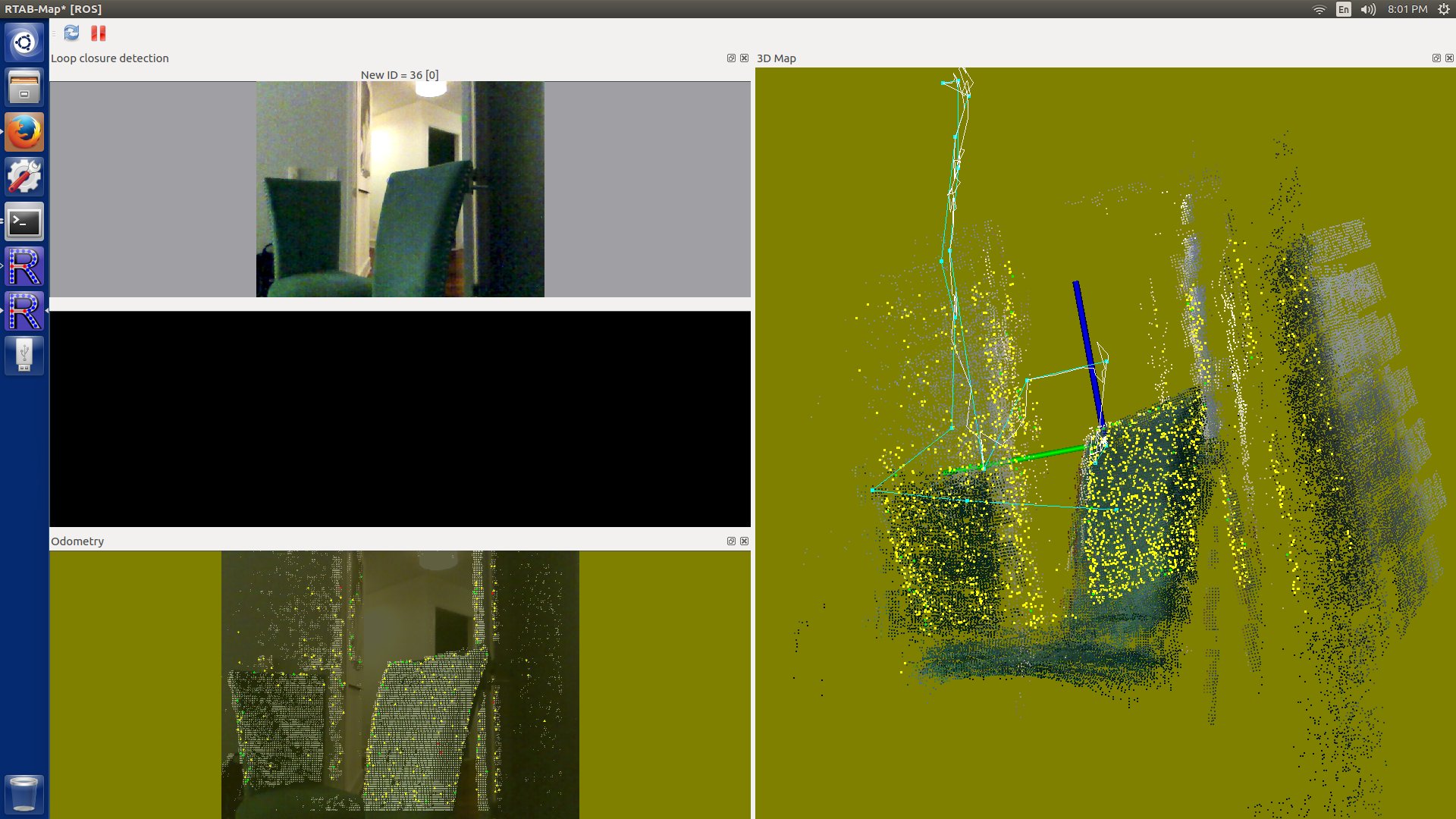
A SLAM library is provided by RTAB-Map.
roscd realsense_camera
roslaunch realsense_camera r200_nodelet_rgbd.launch &
roslaunch rtabmap_ros rgbd_mapping.launch rtabmap_args:="--delete_db_on_start" depth_registered_topic:=/camera/depth_registered/sw_registered/image_rect_raw
When you move, odometry is computed visually and a larger 3D model of the room is built. If the screen goes red, it means the odometry is lost and the model building process is stopped.
You have access to the camera and depth data, you're free to develop your own code. If you want to go higher, use OpenCV. And if you need a very high level computer vision library, use VISP. With VISP, you can perform tasks like model based tracking.