Event-based camera data representation.
Some popular representation and their demo codes.
If you see other representation (paper or code), please tell me or make a pull request to this repo. Many thanks
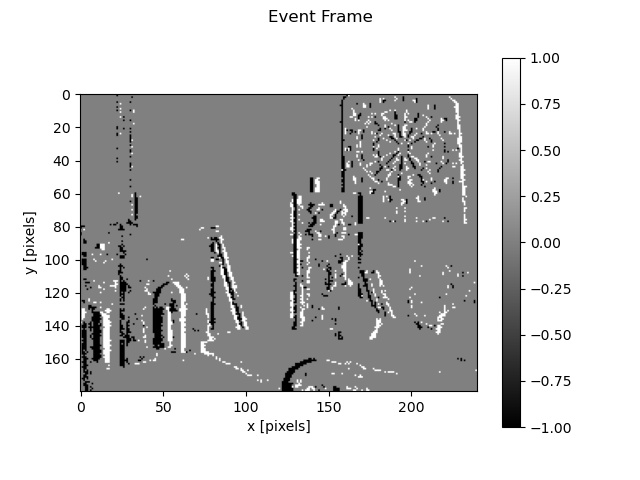
Event frame is the simplest representation. Considering polarity, each pixel in image would only be +1/0/-1, which means a positive/no/negative event occurs here.
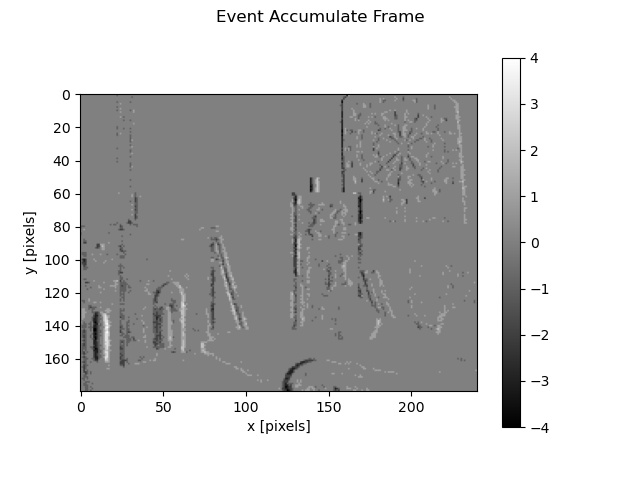
Event accumulate frame is sometimes called event intensity frame. Each pixel would be a number that indicate the intensity. For a uint8 image, the range would be (0, 255), where 128 means no events (or the same number of positive/negative events), >128 means more positive events occurred here, and vice versa.
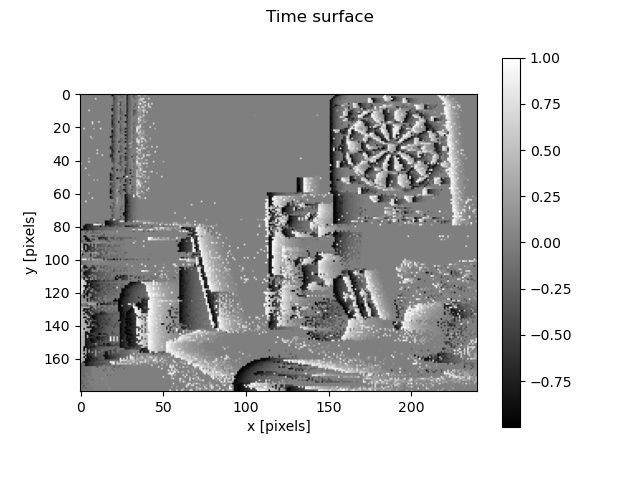
Time-surface is also caled surface of active events, which include both spatio and temporal information. The value of each pixel should be
where t is the reference time, which could be 'local' or 'global'.
Check this paper for more details.
Some codes are inspired by TU Berlin's Course: https://github.com/tub-rip/events_viz