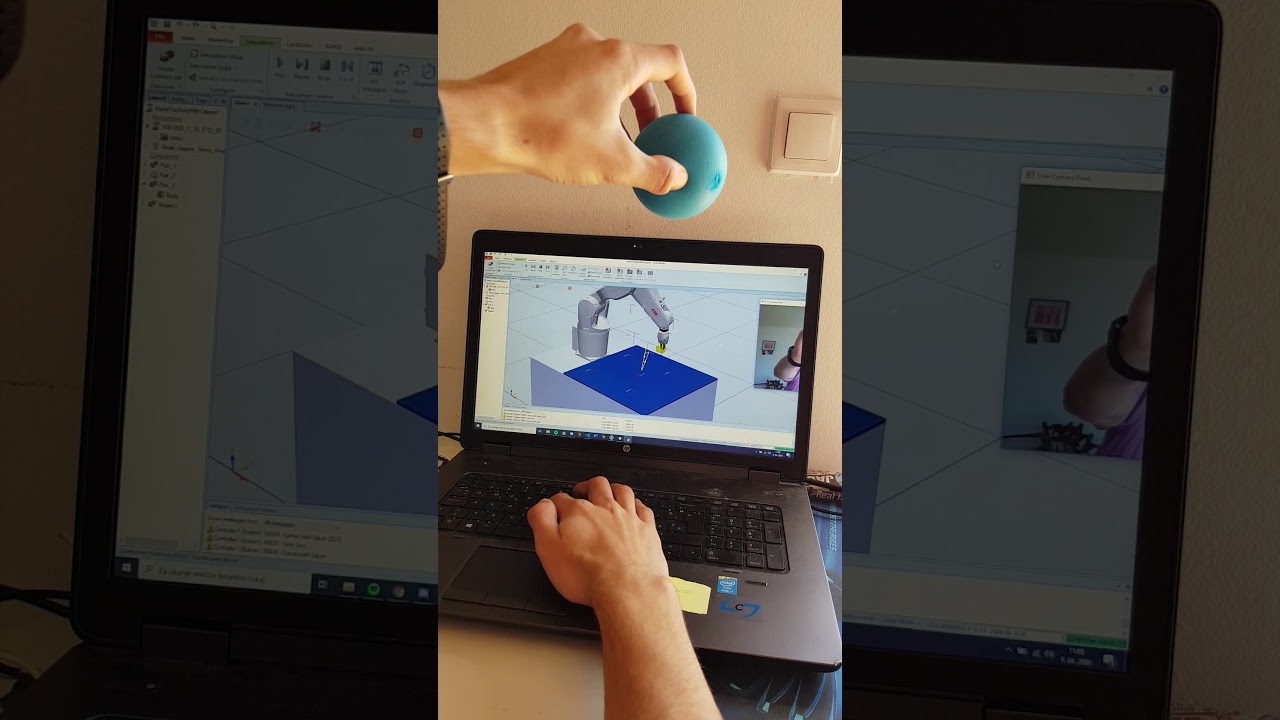
control ABB robot using camera object detection and packets
Install python3
launch RobotStudio HandTracking.rspag
Edit RAPID if needed IP, PORT default set to localhost
pip install -r requirements.txt
Start simulation in RobotStudio, after you configured IP and PORT correctly in RAPID and config.py
Launch tracking ForcePowers_start.py using command python ForcePowers_start.py
It should connect and print the Robot position in terminal
Wait for camera to start
Position your object in the green squares so it can capture its color then press z !
Tracking will start robot will move
Change configuration(xyz,xy) by pressing c
Pause by pressing p
Exit with esc
Recapture color by pressing r and then z when ready
Error conformation press e
If connection error occurs 3 times check terminal and press any key to retry
Edit config.py if necessary.
Have good lighting
Use object with a unique color
Have all windows open for a better view
If u want to use commands u have to click the Camera live feed window
For any questions write to me at [email protected] I will be happy to help